Visão Computacional¶
Transfer Learning e Arquiteturas de CNN¶
Prof. Dr. Denis Mayr Lima Martins¶
Pontifícia Universidade Católica de Campinas¶
Qual o maior problema em depender apenas de aprendizado supervisionado tradicional?¶
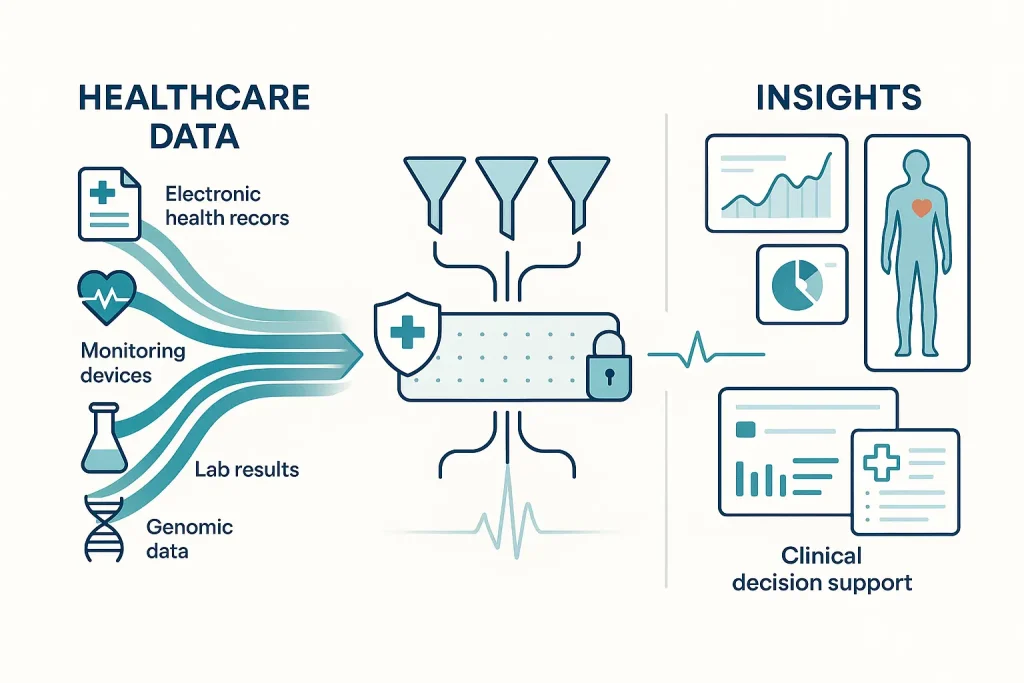 Dados anotados (labeled data) na área da Saúde são caros e difíceis de obter em larga escala. Fonte: Macgence.
Dados anotados (labeled data) na área da Saúde são caros e difíceis de obter em larga escala. Fonte: Macgence.
Treinamento Supervisionado Tradicional¶
- Escassez de Dados Rotulados: Obter dados rotulados é caro e demorado.
- Generalização Limitada: Modelos treinados em datasets específicos podem ter dificuldades para generalizar para novos cenários.
- Necessidade de Engenharia de Features: Requer conhecimento especializado para selecionar e criar features relevantes.
O Papel das Features "Universais"¶
- As features de baixo nível (ex: bordas, cantos) são universalmente úteis para tarefas de Visão Computacional, independentemente do domínio.
- Camadas Convolucionais Iniciais: Estas são o extrator de características central de qualquer CNN.
- Importância da Generalização: O conhecimento destas camadas (ex: conv1, conv2) tende a se generalizar bem para datasets drasticamente diferentes (ex: imagens naturais para imagens médicas).
 Features extraídas (i.e., aprendidas) por CNNs. Fonte: Cross Validated.
Features extraídas (i.e., aprendidas) por CNNs. Fonte: Cross Validated.
Objetivos de Aprendizagem¶
- Compreender o conceito de Transfer Learning em Redes Neurais.
- Entender o processo de Pré-Treinamento e como utilizar modelos Pré-Treinados.
- Compreender estratégias de Finetuning.
- Explorar arquiteturas famosas de CNNs.
Transfer Learning¶
|
O Transfer Learning é popular em Deep Learning, pois as Redes Neurais Profundas (DNNs) exigem muitos dados e o custo de treinamento é alto. Motivações Principais:
|
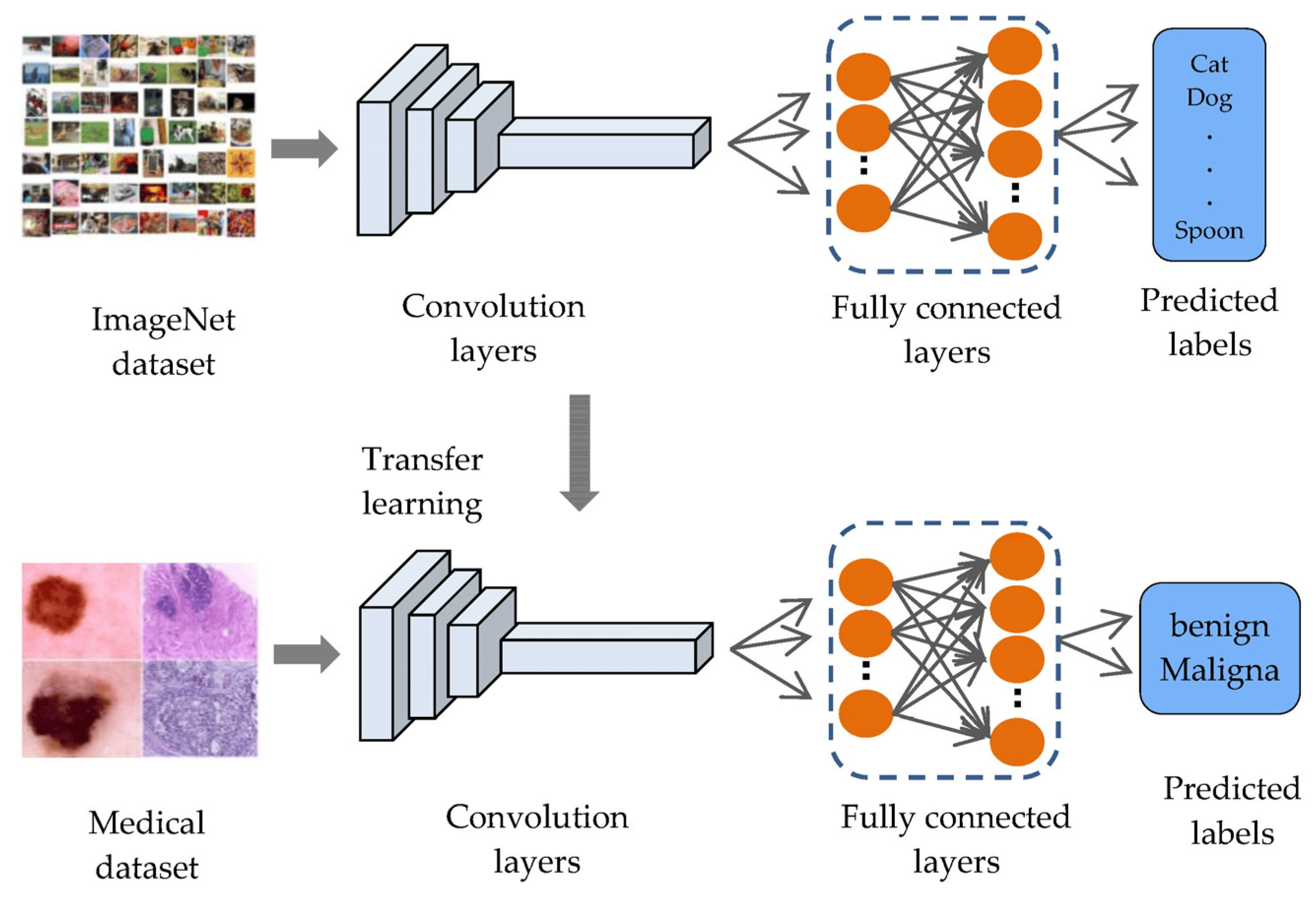 Transfer Learning. Fonte: https://toloka.ai/blog/transfer-learning/.
Transfer Learning. Fonte: https://toloka.ai/blog/transfer-learning/.
|

Tipos de Transfer Learning¶
Transferência Indutiva: Tarefas de origem e destino são diferentes (ex: pré-treinar para classificação de imagem, adaptar para detecção de objetos).
- Pode ser Supervisionada (dados rotulados disponíveis).
Transferência Transdutiva (Adaptação de Domínio): As tarefas são as mesmas, mas os domínios (distribuição dos dados) são diferentes.
- Ex: Classificador de carros treinado com fotos de rua (Origem) e adaptado para fotos de satélite (Destino).
Transferência Não-Supervisionada: Tarefas diferentes e não há dados rotulados na tarefa alvo (foco na estrutura dos dados).
AlexNet¶
- Possui 8 camadas (5 convolucionais e 3 totalmente conectadas).
- Entrada de imagens $227 \times 227 \times 3$.
- Primeira camada (CONV1) usou $96$ filtros de $11 \times 11$ com stride 4.
- O input original era dividido em duas GPUs devido à limitação de memória (3 GB na GTX 580).
Inovações Chave:
- ReLU (Rectified Linear Unit): Foi a primeira utilização de ReLU em larga escala, substituindo tanh e sigmoid.
- Max Pooling Sobreposto (Overlap Pooling): Utiliza filtros $3 \times 3$ com stride 2, resultando em regiões de pooling que se sobrepõem.
- Dropout: Utilizado com probabilidade $0.5$ nas camadas totalmente conectadas (FC) para prevenir overfitting.
AlexNet¶
import torch
import torchvision.models as models
# Carrega o modelo pré-treinado
alexnet = models.alexnet(pretrained=True)
VGG¶
- A VGG16 (16 camadas de peso) e VGG19 (19 camadas de peso) usam exclusivamente camadas convolucionais $3 \times 3$ com stride 1 e padding 1, e camadas de max pooling $2 \times 2$ com stride 2.
- Uma pilha de três camadas convolucionais $3 \times 3$ (com stride 1) tem o mesmo campo receptivo efetivo que uma única camada $7 \times 7$.
- Paper: https://arxiv.org/pdf/1409.1556
Vantagens do Filtro Pequeno ($3 \times 3$):
- Permite incorporar mais não-linearidades (funções de ativação ReLU).
- Resulta em menos parâmetros em comparação com um único filtro grande equivalente, por exemplo, $3 \times (3^2 C^2)$ versus $7^2 C^2$.
Desvantagens:
- Possui um grande número de parâmetros e é lenta, totalizando 138 milhões de parâmetros na VGG16.

VGG¶
import torch
import torchvision
import torch.nn as nn
from torchvision import models
model = models.vgg16(pretrained=True)

ResNet¶
- ResNet (Residual Network) resolve o problema de degradação que ocorre em redes muito profundas, onde adicionar mais camadas pode levar a um erro de treinamento e teste maior.
- Degradação vs. Otimização: Redes profundas (sem atalhos) sofrem de degradação, onde o erro de treinamento piora com o aumento da profundidade.
|
Conexões Residuais (Skip Connections):
|
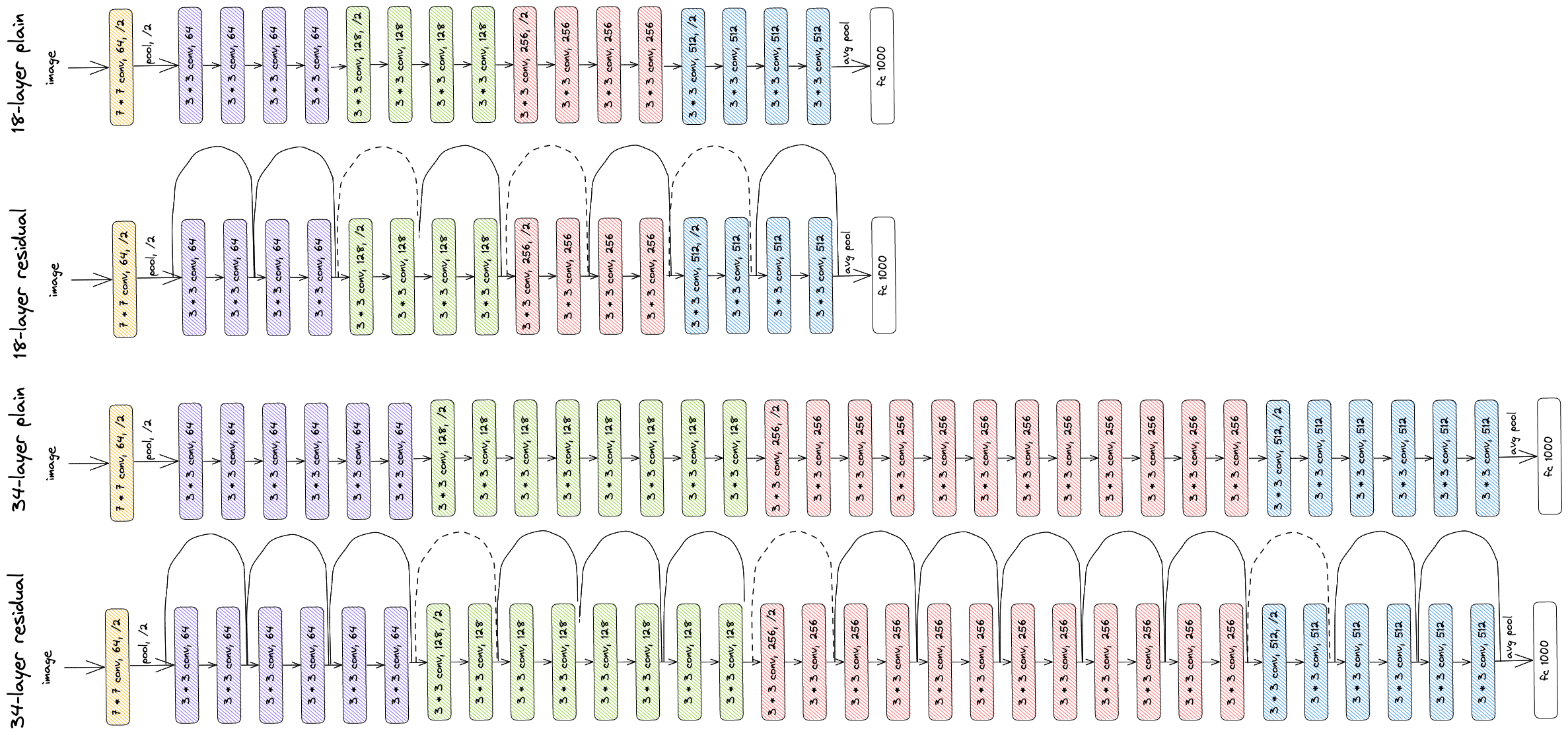
 Skip connection.
Skip connection.
|
ResNet¶
import torch
from torch import nn
class ResLayer(nn.Module):
def __init__(self,ni,no,kernel_size,stride=1):
super(ResLayer, self).__init__()
padding = kernel_size - 2
self.conv = nn.Sequential(
nn.Conv2d(ni, no, kernel_size, stride,
padding=padding),
nn.ReLU()
)
def forward(self, x):
return self.conv(x) + x
Veja também: https://nn.labml.ai/resnet/index.html
Armadilhas Comuns no Transfer Learning¶
A aplicação incorreta do Transfer Learning pode resultar em consequências negativas, conhecidas como transferência negativa.
| Armadilha | Descrição | Dicas de Mitigação |
|---|---|---|
| Overfitting em Conjuntos Pequenos | Adaptação excessiva a poucos exemplos no dataset alvo. | Usar taxas de aprendizado muito baixas (1e-4 a 1e-5), regularização (dropout, weight decay), e data augmentation. |
| Esquecimento Catastrófico | Perda do conhecimento original (da tarefa fonte) durante o fine-tuning para a tarefa alvo. | Aplicar congelamento seletivo nas camadas iniciais ou usar técnicas avançadas como regularização elástica. |
| Deslocamento de Domínio (Transferência Negativa) | O conhecimento transferido prejudica o desempenho porque os domínios de origem e destino são muito dissimilares. | Garantir que a distribuição dos dados de origem e destino sejam semelhantes e que as tarefas sejam relacionadas. |
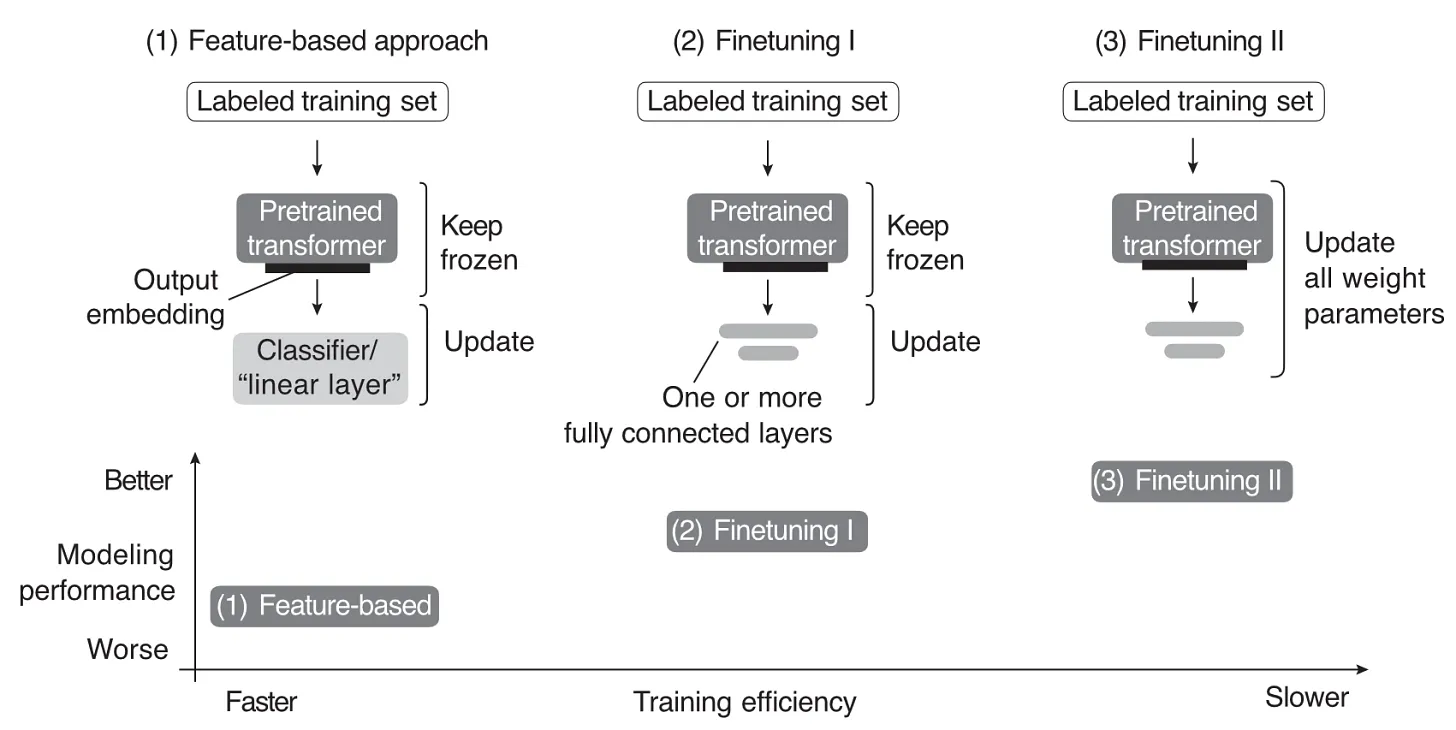
Fine-Tuning¶
O Fine-tuning é o processo de retreinar um modelo pré-treinado usando uma taxa de aprendizado menor para se adaptar a uma tarefa específica.
Técnicas de Ajuste de Pesos:
- Congelar Camadas (Feature Extraction Puro): As camadas inferiores (extrator de características) são mantidas intactas (frozen), preservando as features universais (bordas, texturas). Apenas a camada final de classificação é treinada do zero.
- Taxas de Aprendizado Diferenciadas (Layer-wise Learning Rate Decay): Aplica-se taxas de aprendizado progressivamente menores para camadas mais próximas da entrada. Isso evita a destruição de conhecimento fundamental.
- Treinamento em Poucas Épocas: Geralmente, 2–10 épocas são suficientes para a nova tarefa, monitorando com early stopping.
Fine-tuning: Exemplo¶
model = models.vgg16(pretrained=True)
# Congela os pesos da rede original
for param in model.parameters():
param.requires_grad = False
model.classifier = nn.Sequential(
nn.Flatten(),
nn.Linear(512, 128),
nn.ReLU(),
nn.Dropout(0.2),
nn.Linear(128, 1),
nn.Sigmoid()
)
Conclusão e Próximos Passos¶
- Necessidade Crucial: Transfer Learning é indispensável para superar a escassez de dados e o alto custo computacional em deep learning.
- Transferência Hierárquica: CNNs aprendem features hierárquicas; as camadas iniciais (bordas, blobs) são universais e devem ser preservadas (congeladas).
- Fine-tuning é Delicado: O ajuste fino requer o uso de baixas taxas de aprendizado para evitar a sobreescrita do conhecimento valioso pré-adquirido.
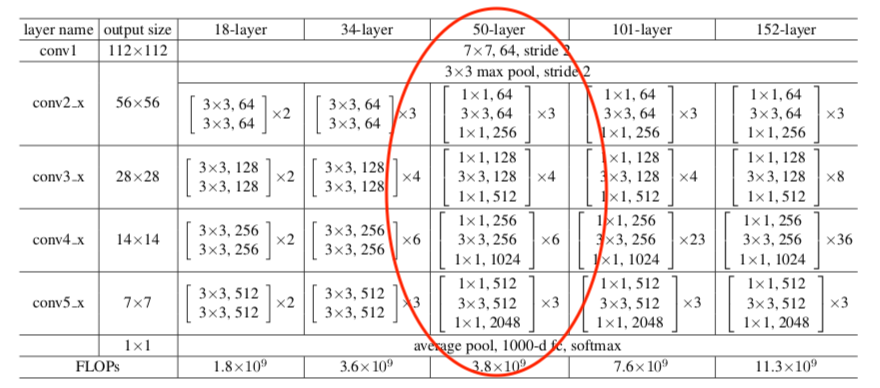
- ResNet é o Default Atual: Arquiteturas como ResNet (152 camadas, conexões residuais) se tornaram o padrão, superando problemas de otimização em redes extremamente profundas.
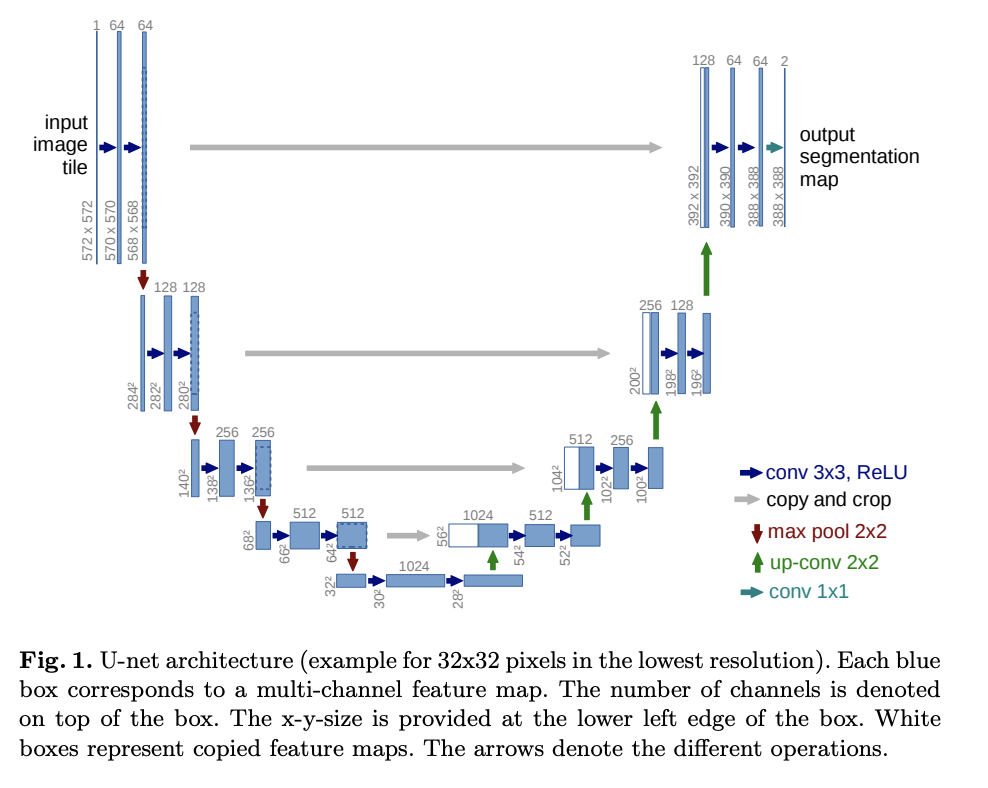
- Outras arquiteturas famosas: Inception, DenseNet, U-Net, EfficientNet, MobileNet.
- Exemplos de código em https://github.com/rasbt/deeplearning-models
- Repositório de Modelos: https://github.com/huggingface/pytorch-image-models