Processamento de Imagens Coloridas#
Visão Computacional | Prof. Dr. Denis Mayr Lima Martins
Objetivos de Aprendizagem#
Compreender os diferentes modelos de cores.
Explicar como o espaço RGB descreve cada pixel por meio dos componentes R, G e B, incluindo suas limitações em relação à percepção humana.
Realizar operações lineares e não‑lineares sobre canais/componentes individuais.
Desenvolver habilidades práticas com ferramentas como OpenCV ou scikit‑image para converter espaços de cor.
Fundamento de Cores#
Cor: percepção visual resultante da interação entre luz, objeto e observador.
Modelo físico: a luz é uma onda eletromagnética.
Faixa visível: 400 nm (violeta) – 700 nm (vermelho).
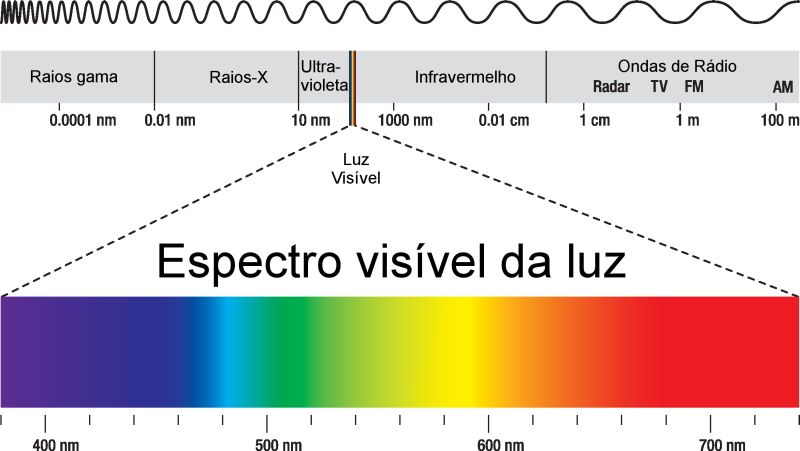
Imagem Colorida#
|
Canal / Banda: Subconjunto da imagem que contém intensidades de um componente específico do espaço colorido. Uma imagem colorida é representada por três componentes de intensidade em cada pixel: \(f(x,y) = [R(x,y), G(x,y), B(x,y)]\) |
|
Modelos de Cor#
|
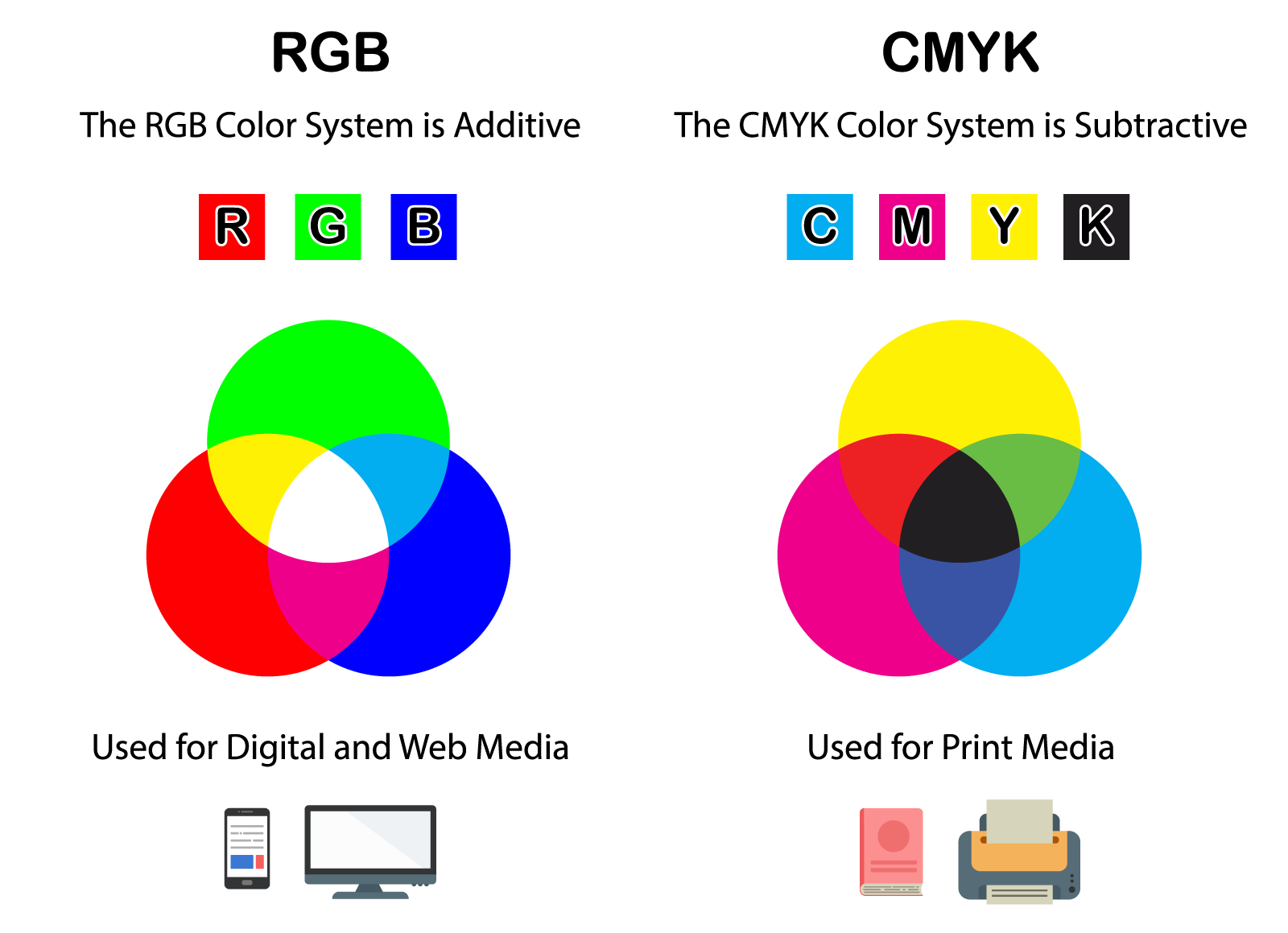 Canais RGB. Fonte: Color Meanings.
Canais RGB. Fonte: Color Meanings.
|
Modelos de Cor: RGB#
Cada pixel é descrito por três componentes de intensidade: \(R\), \(G\) e \(B\).
Os valores são normalmente discretizados em \(b_R,b_G,b_B\) bits, resultando num intervalo \([0,2^{b}-1]\).
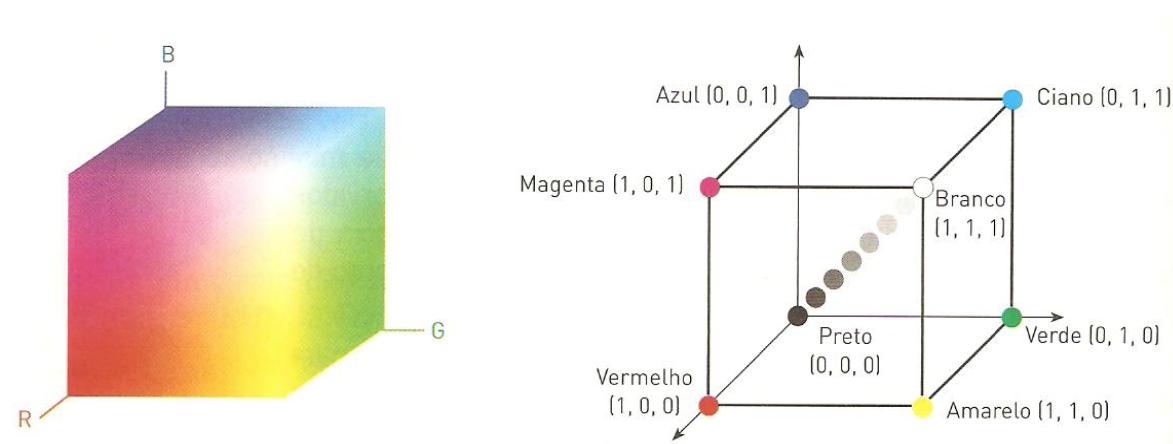
Representação Geométrica: O conjunto de todas as combinações possíveis forma um cubo tridimensional no espaço \((R,G,B)\).
Modelos de Cor: RGB (cont.)#
Cada vértice do cubo corresponde a uma das oito cores extremas:
Linearidade: Combinações lineares de cores (ex.: mistura de vermelho e verde) são pontos ao longo das arestas.
Percepção luminosa: A distância euclidiana entre dois pontos não reflete necessariamente a diferença perceptual.
A luminância \(L = 0,2126R+0,7152G+0,0722B\) (para sRGB) descreve melhor o brilho percebido.
 Cubo do Modelo RGB. Fonte: Wikipedia.
Cubo do Modelo RGB. Fonte: Wikipedia.
Modelos de Cor: HSV#
Cada pixel é descrito por três componentes:
\(H \in [0^\circ,360^\circ)\) (matiz)
\(S \in [0,1]\) (saturação)
\(V \in [0,1]\) (valor / luminância)
Representação Geométrica: O conjunto de todas as combinações forma um cilindro no espaço tridimensional \((H,S,V)\). A base circular corresponde a \(V=1\) (nível máximo de luminância); cada raio da base representa um matiz com saturação máxima; a altura do cilindro é dada por \(V\).
 Cilindro do Modelo HSV. Fonte: Wikipedia.
Cilindro do Modelo HSV. Fonte: Wikipedia.
Modelos de Cor: HSV (cont.)#
O modelo é projetado para refletir a percepção humana de cor:
Matiz determina a cor propriamente dita (vermelho, verde, azul…);
Saturação indica quão “pura” essa cor está;
Valor controla o brilho.
Pontos na borda do cilindro (\(S=1\)) correspondem a cores “puras” (sem mistura de branco).
À medida que \(V\) diminui, os pontos se movem em direção ao centro do cilindro, representando tons mais escuros ou cinzentos.
Alterações apenas no componente \(H\) giram o ponto ao redor da base circular, mudando a cor sem alterar saturação nem brilho.

Implementação#
import cv2
import numpy as np
import matplotlib.pyplot as plt
from urllib.request import urlopen
SEED = 1234
np.random.seed(SEED)
A module that was compiled using NumPy 1.x cannot be run in
NumPy 2.2.5 as it may crash. To support both 1.x and 2.x
versions of NumPy, modules must be compiled with NumPy 2.0.
Some module may need to rebuild instead e.g. with 'pybind11>=2.12'.
If you are a user of the module, the easiest solution will be to
downgrade to 'numpy<2' or try to upgrade the affected module.
We expect that some modules will need time to support NumPy 2.
Traceback (most recent call last): File "<frozen runpy>", line 198, in _run_module_as_main
File "<frozen runpy>", line 88, in _run_code
File "/opt/anaconda3/lib/python3.11/site-packages/ipykernel_launcher.py", line 17, in <module>
app.launch_new_instance()
File "/opt/anaconda3/lib/python3.11/site-packages/traitlets/config/application.py", line 992, in launch_instance
app.start()
File "/opt/anaconda3/lib/python3.11/site-packages/ipykernel/kernelapp.py", line 701, in start
self.io_loop.start()
File "/opt/anaconda3/lib/python3.11/site-packages/tornado/platform/asyncio.py", line 195, in start
self.asyncio_loop.run_forever()
File "/opt/anaconda3/lib/python3.11/asyncio/base_events.py", line 607, in run_forever
self._run_once()
File "/opt/anaconda3/lib/python3.11/asyncio/base_events.py", line 1922, in _run_once
handle._run()
File "/opt/anaconda3/lib/python3.11/asyncio/events.py", line 80, in _run
self._context.run(self._callback, *self._args)
File "/opt/anaconda3/lib/python3.11/site-packages/ipykernel/kernelbase.py", line 534, in dispatch_queue
await self.process_one()
File "/opt/anaconda3/lib/python3.11/site-packages/ipykernel/kernelbase.py", line 523, in process_one
await dispatch(*args)
File "/opt/anaconda3/lib/python3.11/site-packages/ipykernel/kernelbase.py", line 429, in dispatch_shell
await result
File "/opt/anaconda3/lib/python3.11/site-packages/ipykernel/kernelbase.py", line 767, in execute_request
reply_content = await reply_content
File "/opt/anaconda3/lib/python3.11/site-packages/ipykernel/ipkernel.py", line 429, in do_execute
res = shell.run_cell(
File "/opt/anaconda3/lib/python3.11/site-packages/ipykernel/zmqshell.py", line 549, in run_cell
return super().run_cell(*args, **kwargs)
File "/opt/anaconda3/lib/python3.11/site-packages/IPython/core/interactiveshell.py", line 3051, in run_cell
result = self._run_cell(
File "/opt/anaconda3/lib/python3.11/site-packages/IPython/core/interactiveshell.py", line 3106, in _run_cell
result = runner(coro)
File "/opt/anaconda3/lib/python3.11/site-packages/IPython/core/async_helpers.py", line 129, in _pseudo_sync_runner
coro.send(None)
File "/opt/anaconda3/lib/python3.11/site-packages/IPython/core/interactiveshell.py", line 3311, in run_cell_async
has_raised = await self.run_ast_nodes(code_ast.body, cell_name,
File "/opt/anaconda3/lib/python3.11/site-packages/IPython/core/interactiveshell.py", line 3493, in run_ast_nodes
if await self.run_code(code, result, async_=asy):
File "/opt/anaconda3/lib/python3.11/site-packages/IPython/core/interactiveshell.py", line 3553, in run_code
exec(code_obj, self.user_global_ns, self.user_ns)
File "/var/folders/p7/p37cm2fj10xgjrjj5rzdm66c0000gn/T/ipykernel_59203/488522286.py", line 3, in <module>
import matplotlib.pyplot as plt
File "/opt/anaconda3/lib/python3.11/site-packages/matplotlib/__init__.py", line 161, in <module>
from . import _api, _version, cbook, _docstring, rcsetup
File "/opt/anaconda3/lib/python3.11/site-packages/matplotlib/rcsetup.py", line 27, in <module>
from matplotlib.colors import Colormap, is_color_like
File "/opt/anaconda3/lib/python3.11/site-packages/matplotlib/colors.py", line 57, in <module>
from matplotlib import _api, _cm, cbook, scale
File "/opt/anaconda3/lib/python3.11/site-packages/matplotlib/scale.py", line 22, in <module>
from matplotlib.ticker import (
File "/opt/anaconda3/lib/python3.11/site-packages/matplotlib/ticker.py", line 143, in <module>
from matplotlib import transforms as mtransforms
File "/opt/anaconda3/lib/python3.11/site-packages/matplotlib/transforms.py", line 49, in <module>
from matplotlib._path import (
---------------------------------------------------------------------------
AttributeError Traceback (most recent call last)
AttributeError: _ARRAY_API not found
---------------------------------------------------------------------------
ImportError Traceback (most recent call last)
Cell In[1], line 3
1 import cv2
2 import numpy as np
----> 3 import matplotlib.pyplot as plt
4 from urllib.request import urlopen
6 SEED = 1234
File /opt/anaconda3/lib/python3.11/site-packages/matplotlib/__init__.py:161
157 from packaging.version import parse as parse_version
159 # cbook must import matplotlib only within function
160 # definitions, so it is safe to import from it here.
--> 161 from . import _api, _version, cbook, _docstring, rcsetup
162 from matplotlib.cbook import sanitize_sequence
163 from matplotlib._api import MatplotlibDeprecationWarning
File /opt/anaconda3/lib/python3.11/site-packages/matplotlib/rcsetup.py:27
25 from matplotlib import _api, cbook
26 from matplotlib.cbook import ls_mapper
---> 27 from matplotlib.colors import Colormap, is_color_like
28 from matplotlib._fontconfig_pattern import parse_fontconfig_pattern
29 from matplotlib._enums import JoinStyle, CapStyle
File /opt/anaconda3/lib/python3.11/site-packages/matplotlib/colors.py:57
55 import matplotlib as mpl
56 import numpy as np
---> 57 from matplotlib import _api, _cm, cbook, scale
58 from ._color_data import BASE_COLORS, TABLEAU_COLORS, CSS4_COLORS, XKCD_COLORS
61 class _ColorMapping(dict):
File /opt/anaconda3/lib/python3.11/site-packages/matplotlib/scale.py:22
20 import matplotlib as mpl
21 from matplotlib import _api, _docstring
---> 22 from matplotlib.ticker import (
23 NullFormatter, ScalarFormatter, LogFormatterSciNotation, LogitFormatter,
24 NullLocator, LogLocator, AutoLocator, AutoMinorLocator,
25 SymmetricalLogLocator, AsinhLocator, LogitLocator)
26 from matplotlib.transforms import Transform, IdentityTransform
29 class ScaleBase:
File /opt/anaconda3/lib/python3.11/site-packages/matplotlib/ticker.py:143
141 import matplotlib as mpl
142 from matplotlib import _api, cbook
--> 143 from matplotlib import transforms as mtransforms
145 _log = logging.getLogger(__name__)
147 __all__ = ('TickHelper', 'Formatter', 'FixedFormatter',
148 'NullFormatter', 'FuncFormatter', 'FormatStrFormatter',
149 'StrMethodFormatter', 'ScalarFormatter', 'LogFormatter',
(...)
155 'MultipleLocator', 'MaxNLocator', 'AutoMinorLocator',
156 'SymmetricalLogLocator', 'AsinhLocator', 'LogitLocator')
File /opt/anaconda3/lib/python3.11/site-packages/matplotlib/transforms.py:49
46 from numpy.linalg import inv
48 from matplotlib import _api
---> 49 from matplotlib._path import (
50 affine_transform, count_bboxes_overlapping_bbox, update_path_extents)
51 from .path import Path
53 DEBUG = False
ImportError: numpy.core.multiarray failed to import
def show_images(original, transformed):
figure, axarr = plt.subplots(1,2, figsize=(6,6))
axarr[0].imshow(original, cmap= 'gray')
axarr[1].imshow(transformed, cmap= 'gray')
# Remove plt grid e ticks
for ax in axarr.ravel():
ax.set_axis_off()
plt.show()
Usando Scikit-Image#
from skimage import data
from skimage.color import rgb2gray,rgb2hsv
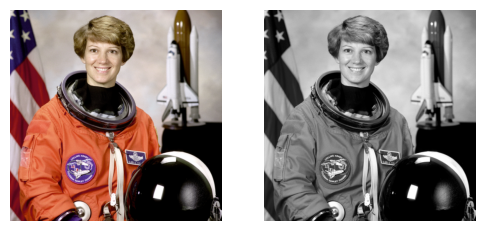
original = data.astronaut()
grayscale = rgb2gray(original)
show_images(original, grayscale)
Observando canais#
figure, axarr = plt.subplots(1,3, figsize=(10,10))
axarr[0].imshow(original[:,:,0], cmap= 'Reds')
axarr[1].imshow(original[:,:,1], cmap= 'Greens')
axarr[2].imshow(original[:,:,2], cmap= 'Blues')
for ax in axarr.ravel():
ax.set_axis_off()
plt.show()

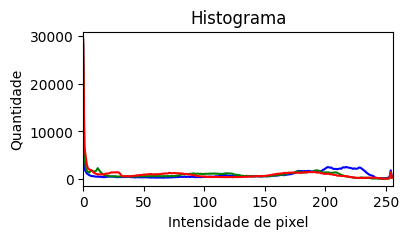
Histograma dos Canais RGB#
plt.figure(figsize=(4, 2))
color = ('b','g','r')
for i,col in enumerate(color):
histr = cv2.calcHist([original],[i],None,[256],[0,256])
plt.plot(histr,color = col)
plt.xlim([0,256])
plt.title('Histograma')
plt.xlabel('Intensidade de pixel')
plt.ylabel('Quantidade')
plt.show()
Modelo HSV: Aplicação#
Em geral, os objetos presentes em uma cena digital exibem tonalidades (tons) e níveis de luminosidade distintos. No espaço de cores RGB, tanto o tom quanto a luminosidade são obtidos como combinações lineares dos três canais primários R, G e B.
Ao converter para o modelo HSV (Hue–Saturation–Value), esses atributos se tornam atributos independentes: o canal H representa exclusivamente o tom, enquanto o canal V encapsula a luminosidade.
Aplicando um limiar ao canal H (ou ao canal V, conforme a aplicação), podemos separar uma região de interesse.
# Carrega a imagem de exemplo (café)
rgb_img = data.coffee()
# Converte a representação RGB para HSV.
hsv_img = rgb2hsv(rgb_img)
# Canal de tom (primeiro eixo na matriz HSV)
hue_img = hsv_img[:, :, 0]
# Canal de luminosidade (terceiro eixo)
value_img = hsv_img[:, :, 2]
Modelo HSV: Aplicação (cont.)#
fig, (ax0, ax1, ax2) = plt.subplots(ncols=3, figsize=(8, 3))
ax0.imshow(rgb_img)
ax0.set_title("Imagem RGB")
ax0.axis('off')
# cmap 'hsv' permite observar o ciclo angular das tonalidades
ax1.imshow(hue_img, cmap='hsv')
ax1.set_title("Canal Hue (matiz)")
ax1.axis('off')
# Exibe o canal Value (luminosidade)
ax2.imshow(value_img)
ax2.set_title("Canal Value (luminosidade)")
ax2.axis('off')
plt.tight_layout()

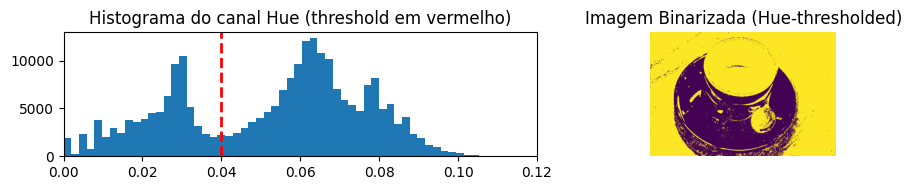
Modelo HSV: Aplicação (cont.)#
Separa e visualiza os componentes de cor mais relevantes para tarefas de segmentação baseada em tom ou luminosidade.
# Definição do limiar de tom (hue)
hue_threshold = 0.04
# Criação de uma imagem binária
binary_img = hue_img > hue_threshold
Modelo HSV: Aplicação (cont.)#
Separa e visualiza os componentes de cor mais relevantes para tarefas de segmentação baseada em tom ou luminosidade.
fig, (ax0, ax1) = plt.subplots(ncols=2, figsize=(10, 2))
# `hue_img.ravel()` converte a matriz 2D em um vetor 1D
ax0.hist(hue_img.ravel(), bins=512)
ax0.set_title("Histograma do canal Hue (threshold em vermelho)")
# Linha vermelha pontilhada indica o ponto do limiar
ax0.axvline(x=hue_threshold, color='r', linestyle='dashed', linewidth=2)
# Evita que valores fora de interesse distorçam a escala
ax0.set_xbound(0, 0.12)
ax1.imshow(binary_img)
ax1.set_title("Imagem Binarizada (Hue-thresholded)")
ax1.axis('off')
fig.tight_layout()
Modelo HSV: Removendo parcialmente a sombra#
fig, ax0 = plt.subplots(figsize=(3, 3))
value_threshold = 0.10
# Construção da máscara binária que combina duas condições:
# hue_img > hue_threshold: pixels cujo tom excede o limite.
# value_img < value_threshold: pixels com brilho inferior ao limiar.
# Considera cor dominante e contraste de luminosidade
binary_img = (hue_img > hue_threshold) | (value_img < value_threshold)
ax0.imshow(binary_img)
ax0.set_title("Imagem binarizada\n com limiar em Hue e Value")
ax0.axis('off')
plt.show()

Alinhamento de Histogramas (Histogram Matching)#
Objetivo: Transformar a distribuição de intensidades (histograma) de uma imagem‑fonte para coincidir com a de uma imagem‑referência.
Se as imagens possuírem múltiplos canais, o alinhamento é feito independentemente para cada canal, contanto que o número de canais seja igual em ambas.
Resultado: A imagem ajustada mantém a mesma estrutura espacial (textura, bordas) mas com tonalidade e contraste semelhantes ao alvo.
Alinhamento de Histogramas: Aplicação#
Procedimento:
Calcula o histograma acumulativo (CDF) da fonte e da referência.
Para cada nível de intensidade na fonte, encontra o valor correspondente que possui o mesmo CDF na referência.
Substitui os pixels da fonte pelos valores mapeados, preservando a ordem dos intensidades.
from skimage import exposure
from skimage.exposure import match_histograms
reference = data.coffee()
image = data.chelsea()
# Alinhamento de histogramas: cada canal RGB é tratado separadamente
matched = match_histograms(image, reference, channel_axis=-1)
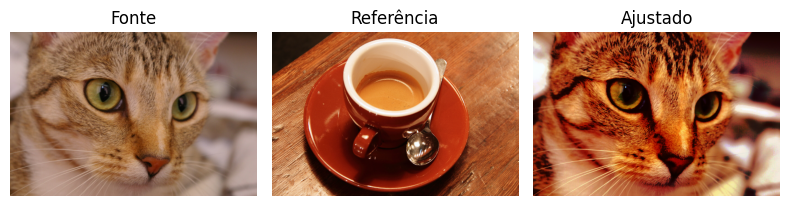
Alinhamento de Histogramas: Aplicação (cont.)#
Pode ser usado como normalização leve em processamento de imagens, especialmente quando as imagens foram capturadas de fontes diferentes ou sob condições distintas (ex.: iluminação).
fig, (ax1, ax2, ax3) = plt.subplots(nrows=1, ncols=3, figsize=(8, 3))
for ax in (ax1, ax2, ax3):
ax.set_axis_off()
ax1.imshow(image)
ax1.set_title('Fonte')
ax2.imshow(reference)
ax2.set_title('Referência')
ax3.imshow(matched)
ax3.set_title('Ajustado')
plt.tight_layout()
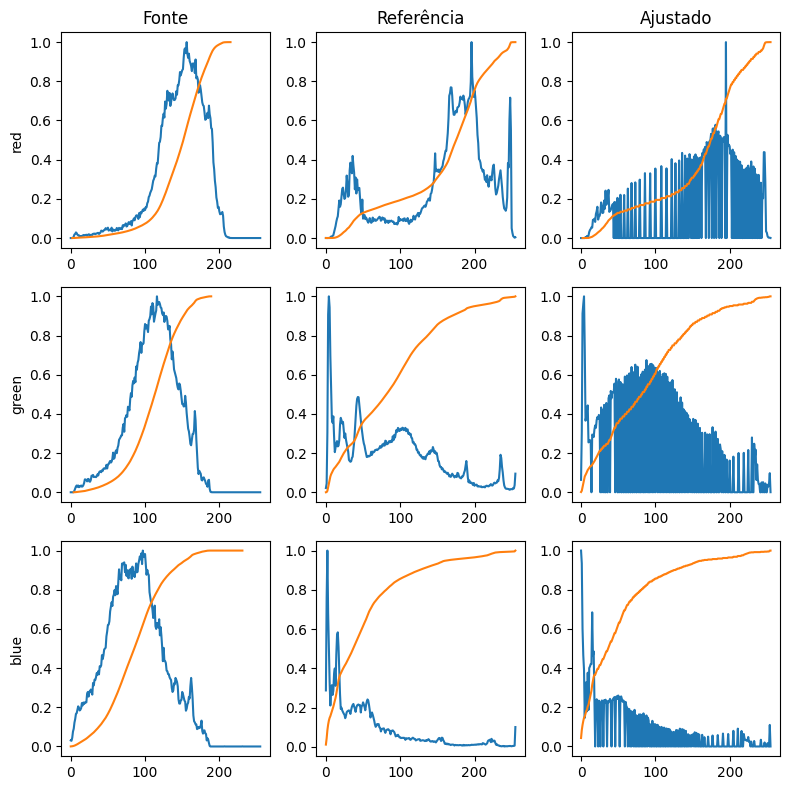
Alinhamento de Histogramas: Plot dos histogramas#
Para ilustrar o efeito do alinhamento, plotamos para cada canal RGB tanto o histograma quanto a distribuição cumulativa (CDF). Note que a imagem ajustada tem a mesma CDF da referência em cada canal.
fig, axes = plt.subplots(nrows=3, ncols=3, figsize=(8, 8))
for i, img in enumerate((image, reference, matched)):
for c, c_color in enumerate(('red', 'green', 'blue')):
# Histograma (normalizado)
img_hist, bins = exposure.histogram(img[..., c], source_range='dtype')
axes[c, i].plot(bins, img_hist / img_hist.max())
# Distribuição cumulativa
img_cdf, bins = exposure.cumulative_distribution(img[..., c])
axes[c, i].plot(bins, img_cdf)
if i == 0: # rótulo do eixo Y apenas na primeira coluna
axes[c, 0].set_ylabel(c_color)
axes[0, 0].set_title('Fonte')
axes[0, 1].set_title('Referência')
axes[0, 2].set_title('Ajustado')
plt.tight_layout()
plt.show()
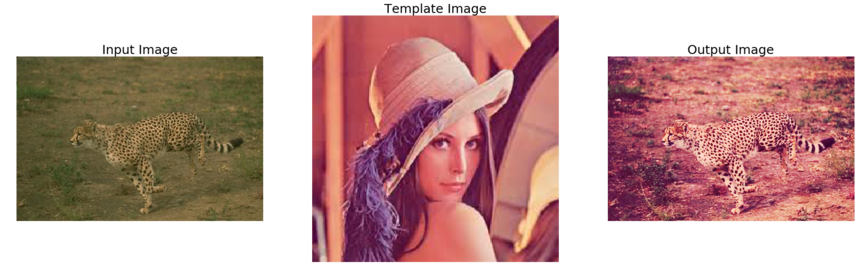
Tinting imagens em Grayscale (cont.)#
Já vimos que manipulação de cores pode ser útil em tarefas de realce de regiões de interesse.
Podemos manipular cores artificialmente uma imagem em grayscale para destacar alguma região. Um processo conhecido como tinting.
A maneira mais simples de obter uma imagem tintada é definir cada canal RGB como a imagem em escala de cinza multiplicada por um fator diferente para cada canal.
from skimage import color
from skimage import img_as_float
# Carrega a imagem de câmera do exemplo (reduzida em 2× para acelerar)
grayscale_image = img_as_float(data.camera()[::2, ::2])
# Converte para RGB (três canais iguais)
image = color.gray2rgb(grayscale_image)
# Fatores de multiplicação para os canais R, G e B
red_multiplier = [1, 0, 0] # apenas vermelho
yellow_multiplier = [1, 1, 0] # vermelho + verde → amarelo
Tinting imagens em Grayscale (cont.)#
fig, (ax0, ax1, ax2) = plt.subplots(ncols=3, figsize=(8, 4))
ax0.imshow(grayscale_image, cmap="gray")
ax0.set_axis_off()
ax1.imshow(red_multiplier * image)
ax1.set_axis_off()
ax2.imshow(yellow_multiplier * image)
ax2.set_axis_off()
plt.show()

Tinting imagens em Grayscale: Modelo HSV#
Em muitos casos, lidar com valores RGB pode não ser ideal.
Vamos usar o modelo HSV para tintar a imagem.
def colorize(image, hue, saturation=1):
"""Adiciona a cor da matiz fornecida a uma imagem RGB.
Por padrão, define a saturação como 1 para que as cores “explodam”.
"""
hsv = color.rgb2hsv(image) # Converte a imagem RGB para HSV
hsv[:, :, 1] = saturation # Define a matiz e saturação desejadas
hsv[:, :, 0] = hue
return color.hsv2rgb(hsv) # Converte de volta para RGB
Tinting imagens em Grayscale: Modelo HSV (cont.)#
hue_rotations = np.linspace(0, 1, 6)
fig, axes = plt.subplots(nrows=1, ncols=6, figsize=(10, 5))
for ax, hue in zip(axes.flat, hue_rotations):
# Reduzimos a saturação para dar um visual “vintage”.
tinted_image = colorize(image, hue, saturation=0.3)
ax.imshow(tinted_image, vmin=0, vmax=1)
ax.set_axis_off()
fig.tight_layout()

Convolução de Imagens Coloridas#
Convolução de Imagens Coloridas#
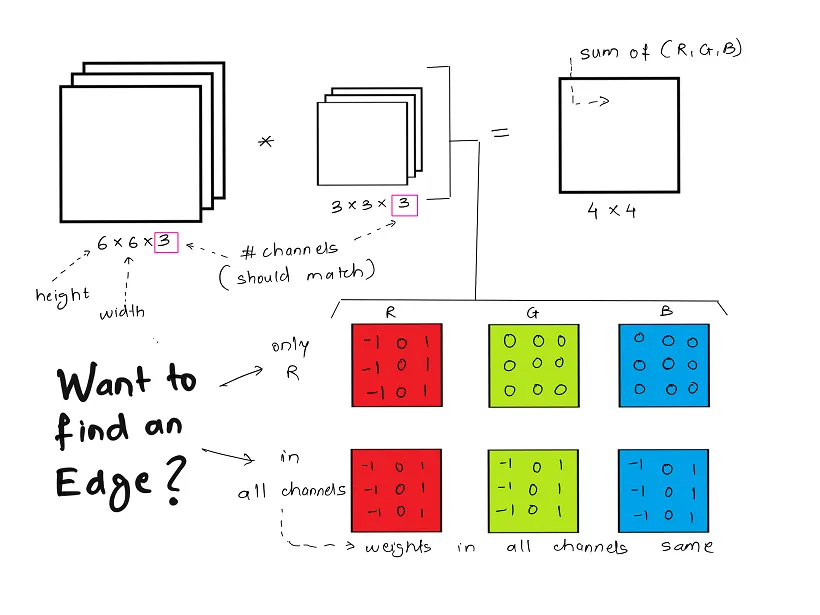
A convolução é aplicada de forma independente em cada canal:
\((I * K)_c(x,y) = \sum_{m}\sum_{n} I_c(x-m,\;y-n)\,K(m,n)\), onde \(c \in \{R,G,B\}\).
Implementação em Excel por Thom Lane: link para o Google Sheets.
Convolução de Imagens Coloridas (cont.)#
Na terminologia de Visão Computacional, um feature map é gerado por canal e, então, somado para formar o resultado final da operação de convolução.
Convolução de Imagem Colorida (cont.)#
Explore o CNN Explainer: https://poloclub.github.io/cnn-explainer/

Convolução de Imagem Colorida (cont.)#
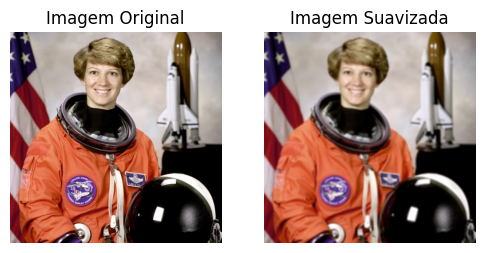
Convolução de Imagem Colorida: Exemplo#
original = data.astronaut()
kernel = np.ones((5,5), np.float32) / 25 # Filtro de média
media_img = cv2.filter2D(original, -1, kernel) # Convolução
figure, axarr = plt.subplots(1,2, figsize=(6,6))
axarr[0].imshow(original, cmap= 'gray')
axarr[0].set_title("Imagem Original")
axarr[1].imshow(media_img, cmap= 'gray')
axarr[1].set_title("Imagem Suavizada")
for ax in axarr.ravel(): ax.set_axis_off()
plt.show()
Resumo#
|

Leitura Recomendada: Capítulo 6. |